ABOUT THE PROJECT
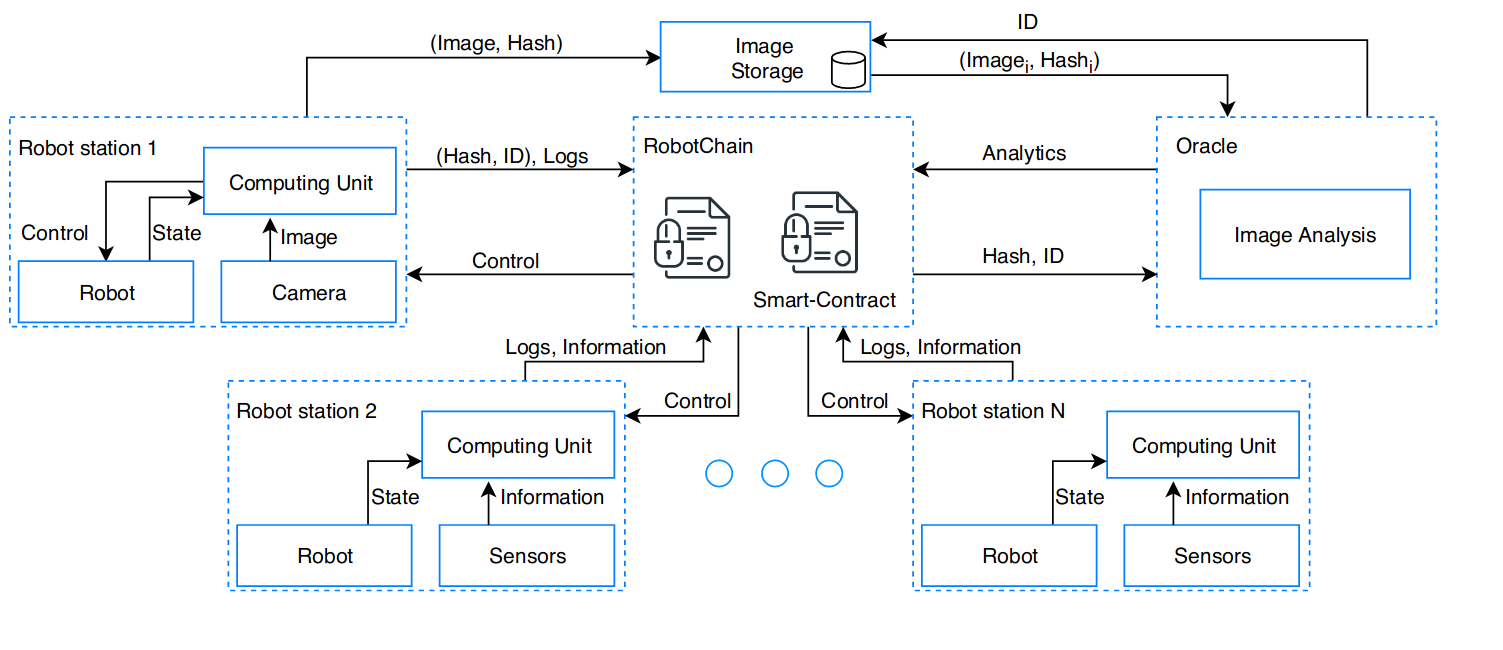
RobotChain is a consortium Blockchain designed for robots in factories. It is an optimized Blockchain that contains
on-chain properties that speed-up the validation process and reduce the number of resources needed to both validate transactions and to store
them on the devices. The premise is that RobotChain is inserted in small and cheap computer units that are connected to robots in order to allow
them to store events and others inside RobotChain. By using smart-contracts we also leverage Artificial Intelligence algorithms and we not only
show that it is possible to integrate Blockchain + Robotics + Artificial Intelligence, but we provide the tools needed to have a unique system
capable of serving as a ledger, as a communication gate and as an autonomous software that automatically and without human intervention have
action-triggers. Moreover, RobotChain provides properties such as accessibility, auditability, non-repudiation, decentralization of data and
applications, (pseudo) anonymity, replication, irreversibility, and others that guarantee that both the robots and the data are secure.
Smart-Contracts
RobotChain uses smart-contracts to communicate with external parties and to autonomously and automatically have action-triggers on the Blockchain and on Robots.
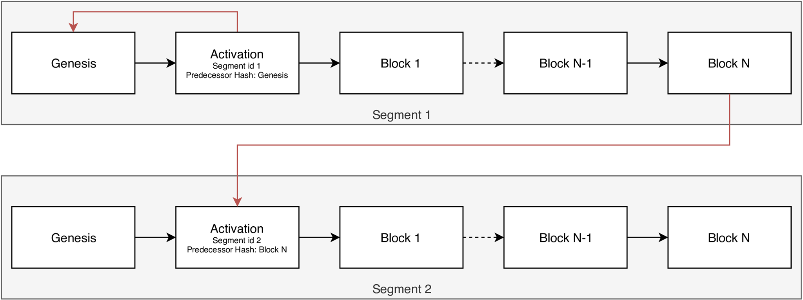
On-Chain Solutions
RobotChain has on-chain solutions that reduce the amount of space needed to store the data and the time needed to validate transactions. Improving tremendously the Blockchain inner concepts and allowing smaller devices to run it.
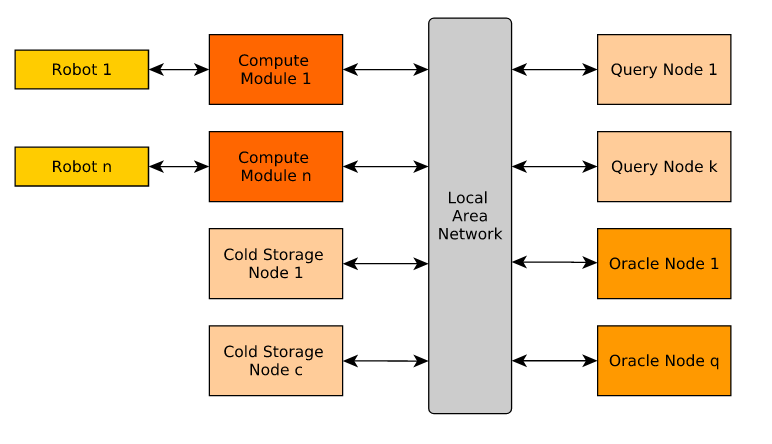
Integration
RobotChain allows the integration with Artificial Intelligence and communication with Oracles to improve its properties and allow Robots to use them.
Support
RobotChain allows the creation of modules by using smart-contracts. With this, it is possible to have a unique system that agglomerates all the applications required.